Аппаратура для обнаружения поверхностных объектов лова (Головко И.И., Дегтярев В.П., Калюжный В.С.) (УДК 639.2.081.7:681.883.4)
В связи с сокращением рыбных запасов Мирового океана, и особенно в традиционно продуктивных районах мирового рыболовства в зоне континентального шельфа, введением практически всеми прибрежными странами экономических зон необходимы поиск и освоение новых промысловых районов. Одним из таких районов должна стать глубоководная открытая часть Мирового океана, считающаяся пока малопродуктивным районом, но охватывающая свыше 50 % всей акватории океана.
При освоении лова в открытом океане наиболее массовыми и ценными в пищевом отношении могут быть макрелещука, летучие рыбы, океанические кальмары, светящийся анчоус и некоторые другие виды, обитающие в поверхностном слое. Запасы указанных объектов по всей площади Мирового океана в случае промышленного освоения их добычи и установления разумных квот вылова могут дать прибавку в размере 0,5-1,5 млн т к общему океаническому вылову рыбы промысловым флотом (Колотовкин и др., 1981). В период сезонной миграции объектами лова у поверхности могут быть и такие традиционные промысловые виды, как скумбрия, ставрида, сардинелла и др.
Для промышленного освоения поверхностного лова необходима эффективная гидроакустическая аппаратура в сочетании с эффективным способом лова. При создании гидроакустической аппаратуры для эхолокации поверхностных объектов надо учитывать, что обнаружение этих объектов необходимо производить в слое от 0 до 15-20 м от границы раздела вода - воздух. В этом слое концентрация промысловых объектов может достигать такого уровня, при котором их промышленный лов будет давать практические результаты. Такая промысловая ситуация связана с образом жизни поверхностных объектов. Их наибольшая концентрация отмечается в ночное время, когда они поднимаются к поверхности океана.
С учетом изложенного представляется следующая модель промысла. Гидроакустической аппаратурой обследуется поверхностный слой на обширной площади открытых районов океана. В тех районах, где концентрация поверхностных объектов достигает уровня, при котором их промышленный лов может дать практические результаты, производится траление или постановка дрифтерных сетей в поверхностном слое. Наибольший эффект будет достигнут при тралении в стороне от кильватерного следа судна. Траление может производиться бортовыми или близнецовыми поверхностными тралами.
Предложенная модель промысла позволяет определить возможность использования обычной рыбопоисковой аппаратуры, а также требования к специальной гидроакустической аппаратуре, предназначенной для обнаружения поверхностных промысловых объектов.
Использование судового эхолота для поиска и. обнаружения поверхностных объектов вообще не имеет смысла, так как заглубление антенны на глубину осадки судна не позволяет просматривать основной слой в несколько метров, прилегающий к поверхности моря. Кроме того, отпугивающее действие судна при приближении к скоплениям или отдельным особям составляет несколько десятков метров и заставляет их уходить в сторону либо перемещаться на глубину.
Использование самых современных рыбопоисковых гидролокаторов для обнаружения промысловых объектов в поверхностном слое 0-20 м также малоэффективно.
Основные поверхностные объекты (макрелещука, летучие рыбы, кальмары) имеют слабую отражательную способность и находятся чаще всего в разреженном состоянии.
При эхолокации в поверхностном слое возникает высокий уровень поверхностной реверберации, складывающийся из рассеяния звука поверхностью океана и слоем воздушных пузырьков, всегда имеющихся в поверхностном слое. Отмеченные явления затрудняют обнаружение поверхностных объектов существующими рыбопоисковыми гидролокаторами.
Для осуществления поиска поверхностных объектов необходима специальная гидроакустическая аппаратура. За рубежом аппаратура подобного назначения создана фирмой Simrad (Норвегия).
Отечественной промышленностью совместно с японской фирмой Furuno создан экспериментальный образец эхолота, осуществляющего локацию снизу вверх и установленного в подводном устройстве, буксируемом с помощью кабель-буксира на глубине и в стороне от судна. Схема поиска поверхностных объектов с использованием такого эхолота представлена на рис. 1. С учетом того, что поверхностные объекты лова в большинстве случаев находятся в разреженном состоянии, основным обнаружителем является эхо-интегратор.
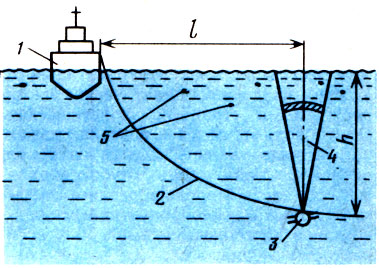
Рис. 1 Схема поиска поверхностных объектов лова: 1 - судно; 2 - кабель-буксир; 3 - подводное буксируемое устройство; 4 - луч эхолота; 5 - поверхностные объекты лова; I - расстояние, на которое отведено подводное буксируемое устройство от борта судна; h - заглубление подводного буксируемого устройства
Структурная схема экспериментального образца представлена на рис. 2. В подводном устройстве сигналы эхолота и информация датчиков глубины и температуры поступают в блок, служащий для одновременного приема и передачи сигналов различного назначения, в том числе и питающего напряжения через одножильный кабель-буксир. Для постановки и выборки подводного устройства с кабель-буксиром служит спуско-подъемное устройство. Кабель-буксир на борту судна наматывается на барабан лебедки. Эхо-сигналы и информация о глубине и температуре через блок разделения сигналов подводного устройства транслируются по кабель-буксиру в блок разделения сигналов бортовой аппаратуры и далее поступают на интерфейс, эхо- интегратор, цветной дисплей и самописец. Эхо-интегратор производит накопление сигналов от объектов, попавших в процессе поиска в луч эхолота. Величина слоя эхоинтегрирования по глубине и дистанции может оперативно изменяться. Цветной дисплей позволяет на экране визуально наблюдать появление эхо- сигналов, положение промысловых объектов относительно поверхности, динамику движения подводного устройства и изменения температуры. На самописце производится запись сигналов от поверхностных объектов, подводного устройства и кривой эхоинтегрирования, позволяющей оценивать уровень концентрации поверхностных объектов. По величине концентрации обнаруженных объектов определяется необходимость проведения лова в обследованном районе.
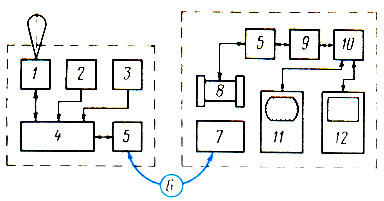
Рис. 2. Структурная схема экспериментального образца: 1 - антенна эхолота; 2 - датчик глубины; 3 - датчик температуры; 4 - аппаратная часть эхолота; 5 - блок разделения сигналов; 6 - одножильный кабель-буксир; 7 - спуско-подъемное устройство; 8 - кабельная лебедка; 9 - интерфейс; 10 - эхо-интегратор; 11 - цветной дисплей; 12 - самописец
Рабочая частота эхолота 200 кГц, ширина луча 8 или 14°, длительность излучаемых импульсов 0,3 мс, диапазоны 20, 40, 80 и 160 м.
Высокая рабочая частота выбрана исходя из того, чтобы частотный диапазон рассеивания звуковой энергии пузырьками воздуха в слое 0-20 м от поверхности, имеющей пределы от 15 до 150 кГц, был вне рабочей частоты и диффузное рассеяние при эхолокации одиночных поверхностных объектов, имеющих в большинстве случаев небольшие геометрические размеры, было минимальным. Кроме того, высокая частота позволяет получить малые размеры акустической антенны, что особенно необходимо при использовании буксируемого устройства.
Ширина луча эхолота должна обеспечивать эхолокацию целей, расположенных как можно ближе к поверхности, и одновременно обзор возможно большего объема водного пространства. Длительность излучаемых импульсов выбрана с учетом необходимости при эхолокации различать одиночные объекты.
Конструктивно подводное буксируемое устройство представляет собой обтекаемое цилиндрическое тело со стабилизаторами на хвосте и планерной коробкой в центральной части, которая обеспечивает при буксировке отведение и заглубление подводного устройства. Стабилизация хода по глубине обеспечивается горизонтальными рулями, управляемыми гидростатическим устройством. Величина отведения подводного устройства от борта судна составляет от 100 до 150 м, заглубление - в пределах 20-100 м. Поисковая скорость буксировки - 6-8 уз, схема буксировки - с правого или левого борта или кормы.
В составе бортовой аппаратуры образца (эхо-интегратор, дисплей и самописец) использованы приборы и блоки эхолотов фирмы Furuno FQ-50 и FQ-70.
Испытания экспериментального образца проведены в центральной части Атлантического океана с участием советских и японских специалистов. В процессе испытаний подтверждена возможность уверенного обнаружения поверхностных скоплений и одиночных объектов размером от 1 до 25 см и выше, произведены их количественная оценка и контрольные обловы, коррелирующие с результатами эхолокации.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://ribovodstvo.com/ 'Рыбоводство'