О дистанционном контроле процессов разноглубинного тралового лова (Кудрявцев В.И., ВНИРО) (УДК 681.883.41)
Разноглубинный траловый промысел продолжает оставаться наиболее распространенным и универсальным видом морского и океанического лова рыбы. Производительность и возможности рационализации указанного вида лова во многом определяются полнотой и эффективностью дистанционного контроля процессов тралений в реальном масштабе времени, начиная с момента обнаружения скоплений и косяков промысловых объектов и вплоть до завершающей стадии - контроля характера и степени заполнения мешка трала рыбой. Его роль еще более возрастает в связи с увеличившимися за последнее время размерами разноглубинных тралов, их устьев, необходимостью существенного снижения энергозатрат на вылов единичной массы рыбы, расширением и развитием работ по созданию формоизменяемых адаптирующихся траловых систем.
Основную роль в решении данной задачи играют средства промысловой гидроакустики, благодаря которым оказалось возможным массовое распространение разноглубинного тралового лова.
В общем случае после обнаружения объектов лова информационное обеспечение процесса разноглубинного траления от гидроакустических средств подводного наблюдения и контроля может быть разделено на следующие этапы:
1) выбор скоплений и косяков, целесообразных для облова данным судном с его промысловым вооружением и возможностями, на основе получаемых данных о параметрах, характеристиках и относительной количественной оценке обнаруженных концентраций (горизонтальная и вертикальная протяженность, глубина нахождения, характеристики перемещения, размерный состав и др.);
2) слежение за выбранными косяками и скоплениями, оценка их положения и поведения, а также определение положения трала для наведения судна и трала на рыбу;
3) оценка результата наведения трала на косяки и скопления рыбы;
4) оценка поведения рыбы в зоне устья трала;
5) оценка хода траления: характера прохождения рыбы от устья к мешку трала и ее поведения в пределах трала;
6) контроль результатов траления: степени и характера заполнения тралового мешка рыбой;
7) измерение и контроль параметров траловой системы (вертикальное, горизонтальное раскрытия трала, его симметрия, расстояние между досками, их положение относительно верхней подборы по вертикали, разность длины вытравленных ваеров и др., т. е. характеристики, которые могут изменяться в ходе траления в результате воздействия внешних факторов среды - скорости судна, течений и т. д.).
Проведенные исследовательские и экспериментальные работы показывают, что благодаря своей гибкости, универсальности, возможности одновременного контроля, измерения как параметров и характеристик траловой системы, так и объектов лова средства промысловой гидроакустики наиболее пригодны и эффективны для решения вышеуказанных задач. В немалой степени этому способствует значительный прогресс в области подводной акустики, достигнутый благодаря широкому внедрению в нее микроэлектроники и микропроцессорной техники.
Выполнение первых двух этапов обеспечивается в основном с помощью гидроакустической техники вертикальной и горизонтальной локации. Хотя обычные однолучевые гидролокаторы стали применяться для информационного обеспечения вышеуказанных первых двух этапов процесса траления еще в самом начале освоения океанического лова разноглубинными тралами (когда не было траловых зондов), они не получили широкого распространения в практике данного вида промысла из-за ряда недостатков и необходимости высокой квалификации и большого опыта операторов-гидроакустиков.
Лишь с появлением на рыболовных траулерах электронно-сканирующих гидролокаторов одновременного кругового обзора, позволяющих в определенной степени "автоматизировать" процесс наблюдения, обеспечивающих быстрый просмотр почти всего водного пространства вокруг судна и не требующих от оператора большого опыта и квалификации, стал возможен контроль процессов тралового лова.
Проведенные нами экспериментальные работы с гидролокатором СН-20Н (с цветным дисплеем отображения и рабочей частотой 24 кГц японской фирмы "Фуруно") интегрированного комплекса тралового лова (ИКТЛ) в рейсе 1989- 1990 г. на РТМС "Азимут" в ЮВТО и ЮЗТО показали, что с помощью указанной аппаратуры возможны: обнаружение косяков на дистанциях до 2000 м и более (даже при нахождении их на небольших глубинах 70-100 м), слежение за ними при работе с тралом как в носовых, так и кормовых (на расстоянии до 1200 м от судна) курсовых углах, оперативное определение положения и параметров косяков, скорости и направления их перемещения, их относительная оценка и др. Благодаря этому может быть существенно повышена эффективность наведения трала на косяки и вероятность попадания объектов лова в зону его действия.
Важный положительный момент использования такой аппаратуры при разноглубинном траловом лове - возможность одновременного параллельного наблюдения за рыбой как впереди судна, так и в кормовой зоне траулера.
С помощью СН-20Н обеспечивалась возможность локации и раздельной индикации эхосигналов от трала, грузов и траловых досок, оценка расстояния между досками. Максимальная дальность локации трала была 1400 м, траловых досок площадью 9 м2 - более 1400 м.
Однако следует учитывать, что для стабильной локации трала и траловых досок оператору необходимо достаточно тщательно регулировать угол наклона характеристик направленности. Кроме того, из-за крена и качки судна лишь в отдельных ситуациях можно видеть на экране одновременно эхосигналы от обеих траловых досок и трала. Точность оценки дистанции до трала, досок, расстояния между досками с помощью гидролокатора также ограничена. Поэтому более рациональным представляется применение отдельной аппаратуры определения положения трала и траловой системы. При этом целесообразно отказаться от концепции определения положения центра верхней подборы трала, принятой в известных системах, решающих данную задачу, и перейти к определению положения зоны действия трала относительно судна. Такая система может быть построена в виде дополнения к гидролокаторам с использованием акустических приемоответчиков, устанавливаемых на траловых досках, что одновременно приводит к определенному упрощению аппаратуры. Сигналы приемоответчиков будут постоянно отображаться на дисплее гидролокатора, указывая фактическое положение зоны действия трала относительно судна и косяков рыбы в горизонтальной плоскости.
На бортовых дисплеях также могут отображаться траектории акустических лучей гидролокатора (с использованием данных температурных датчиков траловых зондов), с учетом которых может быть получена уточненная информация о глубине нахождения косяков.
При тралениях протяженных скоплений для информационного обеспечения первых двух этапов процесса лова целесообразно применять локационную аппаратуру вертикального действия: панорамные эхолоты одновременного секторного обзора. С их помощью и при введении в них режимов "панорамной" регистрации или индикации* может быть обеспечена интегрированная оценка не только вертикальной протяженности скоплений (как у обычного эхолота), но и горизонтальной за длительный период времени. При установке сектора обзора вдоль диаметральной плоскости судна с помощью сканирующего эхолота можно в достаточно больших пределах обеспечить наблюдение за характером и скоростью "заныривания" объектов лова при прохождении над ними траулера. Для протяженных скоплений наиболее характерен такой тип поведения.
* (Кудрявцев В. И. Современное состояние и направления развития средств промысловой гидроакустики. Сер. Промысловая радиоэлектронная аппаратура. Вып. 4. ВНИЭРХ, 1989, с. 23. )
Современная рыбопоисковая аппаратура вертикального действия позволяет дать оценку размерного состава облавливаемой концентрации. С помощью панорамных эхолотов с электронным сканированием луча такая оценка может быть выполнена достаточно оперативно.
В ходе экспериментальных работ было также установлено, что станции кругового обзора позволяют уверенно осуществлять дистанционный контроль за положением и поведением косяков до траловых досок и наблюдать уход рыбы в этой зоне вправо или влево от них и соответственно от трала.
В ближней зоне трала возможности такого наблюдения, как правило, недостаточно для определения положения и поведения рыбы относительно устья трала из-за невысокой разрешающей способности по дальности и углу при довольно больших расстояниях от судна до трала, некоторой маскировки "рыбных" эхосигналов отражениями от трала и дна, рефракции акустических лучей и др. Так, практически невозможно определить, попадет ли косяк, прошедший между досками, в трал или же он окажется под или над тралом. Необходимо иметь возможность оценки с трала обстановки в его ближней передней зоне для корректировки положения трала по вертикали.
В то же время проведенные в рейсе наблюдения за попаданием косяков рыбы, зафиксированных под килем судна, в трал показали, что лишь небольшая часть их фиксируется траловым зондом в устье трала, под тралом или над верхней подборой (в среднем 25-30%, причем в устье трала 15-20%), хотя трал всегда вели ниже горизонта первоначального нахождения косяков на величину предполагаемого "заныривания". Это указывает на то, что большая часть косяков уходит от судна и трала, перемещаясь не только в вертикальной плоскости, но и в стороне от трала (как можно было видеть и по показаниям гидролокатора СН-20Н комплекса ИКТЛ). Изложенное указывает на необходимость получения более полной информации о результатах наведения, чем это обеспечивается существующими промысловыми траловыми зондами.
Кроме того, с увеличением размеров тралов и энергетических затрат на траления требуется более обширная и достоверная информация как о характеристиках траловой системы, так и о поведении в пределах трала рыбы, попадающей в его устье, до завершающей стадии - контроля динамики наполнения тралового мешка.
С учетом изложенного на РТМС "Азимут" были проведены испытания в промысловых условиях блоков гибкой комплексной системы контроля характеристик траловой системы и обстановки в зоне ее действия, которая должна стать завершающим звеном гидроакустического комплекса дистанционного контроля процессов разноглубинного тралового лова.
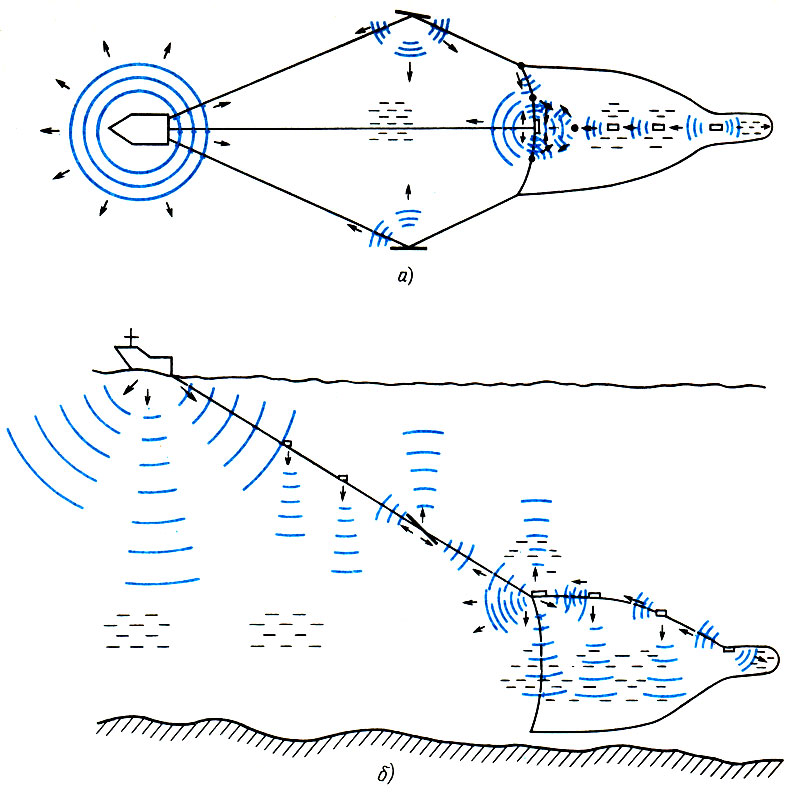
Схема работы комплексной системы дистанционного контроля процессов разноглубинного тралового лова в горизонтальной (а) и вертикальной (б) плоскостях
Система включает центральный траловый блок для локации обстановки в зоне трала, сбора данных от автономных приемоответчиков, приемоответчиков - эхолотов-ретрансляторов, приемоответчиков - глубиномеров - ретрансляторов, устанавливаемых в различных частях траловой системы, и передачи информации на бортовое устройство приема и регистрации отображения.
На данном этапе экспериментальных работ в качестве центрального подводного блока системы использовались модифицированные траловые блоки аппаратуры СКОЛ-2000Р с рабочими частотами 48 и 96 кГц, две акустические антенны, которые могли устанавливаться с возможностью лоцирования в различных направлениях относительно трала (траверзных, к траловому мешку, перед тралом при различных углах наклона), а также применялся подводный траловый блок системы ИКТЛ с акустическими антеннами верхнего и нижнего направления. Кроме того, в систему входили два акустических приемоответчика и автономные траловые эхолоты. Регистрация и отображение всей информации производились на доработанном многоперьевом регистраторе аппаратуры СКОЛ-1500, на дисплее и регистраторе комплекса ИКТЛ.
В процессе выполнения работ было установлено, что при лоцировании в траверзных направлениях (при различных углах наклона антенн в вертикальной плоскости от 0° до 15-20°) эхосигналы от элементов трала на обоих частотах не создают сильного маскирующего фона (обычно имеет место ряд регулярных отражений, по которым, с одной стороны, можно получать некоторую информацию о трале, его работе, а с другой стороны, среди которых достаточно легко выделяются эхосигналы от косяков). В ходе промысловых тралений при параллельной работе тралового зонда комплекса ИКТЛ и тралового блока экспериментальной системы с помощью эхолотных датчиков траверзного обзора обеспечивалась регистрация косяков рыбы в стороне от трала (не попавших в трал), оценка того, какая часть обнаруженного скопления попала в устье трала и какая осталась вне его.
При локации обстановки по направлению к мешку трала (при углах наклона антенн от 5 до 25°) эхосигналы от элементов трала на частоте 48 и 96 кГц также не создают существенных полей; регистрация рыбы в трале на частоте 48 кГц обеспечивалась до дистанции около 180 м. Сигналы от рыбы в траловом мешке (находящемся на расстоянии от подборы свыше 200 м) не были зафиксированы, однако при тралениях на небольших отстояниях трала от дна (на банках) наблюдались сильные отражения от грунта, которые могут приводить к полной маскировке эхосигналов от рыбы в мешке. Для оценки динамики заполнения тралового мешка более целесообразным представляется использование дополнительных акустических приемоответчиков-локаторов-ретрансляторов.
По результатам проведенных тралений с экспериментальной системой, включающей центральный траловый блок и два приемоответчика, можно сделать вывод, что с ее помощью можно контролировать перекос или симметрию трала, измерять расстояния до различных частей трала и дистанцию между ними (например, сечения трала) и оценивать появляющиеся изменения непосредственно в процессе траления. Указанная информация может использоваться для контроля состояния, обеспечения регулировки и настройки трала.
С помощью двух приемоответчиков представляется возможным контролировать расстояние между траловыми досками, измерять разность длины вытравленных ваеров. Одного приемоответчика достаточно для измерения горизонтального раскрытия трала с использованием для расчета информации о вертикальном раскрытии.
При установке центрального тралового блока экспериментальной системы на траловой доске обеспечивалось одновременное измерение горизонта хода доски и расстояния между досками эхолокационным методом (горизонта хода также и манометрическим методом). Путем сравнения с показаниями параллельно работающего тралового блока комплекса ИКТЛ определялось относительное положение верхней подборы трала и траловых досок по вертикали.
В настоящее время проводится разработка и изготовление действующих макетов остальных подводных блоков системы приемоответчиков-эхолотов-ретрансляторов для контроля и наблюдения за характером прохождения облавливаемых объектов в пределах трала и зоны действия траловой системы, а также комплексного акустического блока траловой доски-приемоответчика-локатора-глубиномера-ретранслятора для использования при оценке пространственной симметрии траловой системы, расстояния между траловыми досками и контроля рыбы в пространстве между ними, измерения разности длины вытравленных ваеров, определения положения траловых досок относительно верхней подборы трала и др.
Результаты экспериментальных работ подтвердили правильность выбранных направлений развития системы дистанционного контроля процессов разноглубинного тралового лова.
Загадка лосося
Группа американских ученых придерживается гипотезы о "использовании" лососем при ориентировании в водах океана магнитного поля Земли. Ученые полагают, что в нервной системе мальков лосося, когда до выхода в открытое море в них происходят химические и гормональные изменения, закладывается память о геомагнитной широте и долготе реки, из которой они идут в океан. По их мнению, содержащийся в мозгу рыбы ферромагнитный минерал магнетит, являющийся как бы биологически компасом, "настроенным" на момент выхода рыбы в море, получает информацию о вертикальном и горизонтальном компонентах земного магнитного поля в любом пункте нахождения рыбы. С его помощью она "определяет" разницу между геомагнитным и географическим северным полюсом, что позволяет ей "вычислить" географические координаты своего положения. А ее движение в воде является вторым путем использования воздействия магнитного поля. Генерируемое в нервной системе рыбы при плавании поперек магнитного поля какое-то количество электрического тока может указывать ей направление движения.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://ribovodstvo.com/ 'Рыбоводство'