Прогнозирование ситуации расхождения судов (Подоров И.С., ВИПК) (УДК 621.396.967)
Важнейший элемент процесса обработки радиолокационной информации при прокладке и глазомерном анализе - прогнозирование изменения направления линии относительного движения (ЛОД) и относительной скорости сближения (V0) при маневрах судов.
Действительно, прежде чем начать маневрировать, судоводитель должен хорошо представлять, как будет изменяться ситуация расхождения с целями в результате его собственных действий. Существует несколько вариантов определения закономерностей относительного движения (ЗОД), на основании понимания которых судоводитель может прогнозировать ситуацию расхождения.
Наиболее удачным представляется описание ЗОД, применяемое на тренажерах США. Приведем определение ЗОД при изменениях курса: "При повороте вправо направление ЛОД судов-целей, сближающихся с нами и находящихся впереди траверза, изменится по часовой стрелке, позади траверза - против часовой стрелки (рис. 1); при левом повороте - зеркальное отображение закономерности".
Такой вариант описания ЗОД в течение длительного времени применяется и на некоторых радиолокационных тренажерах Минрыбхоза. Он более универсален по сравнению с другими: охватывается большая часть горизонта вокруг нашего судна, за исключением траверзных секторов; рассмотрены случаи поворота в сторону и отворота от судна-цели.
Вместе с тем в ряде секторов описанная закономерность может не выполняться. Это связано с тем, что при повороте местоположение цели относительно траверзной линии нашего судна меняется, в результате и закономерность для нее может измениться на обратную. Например, при поворотах вправо на 0° - 90° такими являются сектора 1 и 2, при повороте влево - сектора 3 и 4 (см. рис. 1). Описание ЗОД будет универсальным в том случае, если оно будет охватывать ЛОДы всех направлений во всех секторах относительно нашего судна. Samuel М. Van Wyek и Max. Н. Carpenter* для определения направления ЛОД судна-сателлита, находящегося в любом секторе, в том числе и траверзном, при поворотах нашего судна предлагают способ "половинного угла" (рис. 2). Если планируется поворот на угол α, то механический визир направления (а вместе с ним и круг с системой параллельных и перпендикулярной линий) поворачивается от курсовой черты в сторону поворота на половину угла (α/2). Линия, перпендикулярная визиру Направления, покажет сторону ЛОД для судна-сателлита (в противоположную повороту сторону). Ее можно назвать "направляющей" (см. рис. 2, пунктирная линия).
* (The Raelar book. Cornell Maritime Press, 1984.)
Итак, прогноз для сателлитов (когда ЛОД отсутствует) возможен в любом секторе. Рассмотрим, каким образом способ "половинного угла" можно распространить на общий случай, когда судно-цель находится в любом секторе и имеет ЛОД любого направления. Для этого обратимся к способу "линий стягивания" (см. "РХ", 1990, № 2, с. 70).
Рассмотрим ситуацию, когда цели расположены по всему горизонту и сближаются с нашим судном вплотную (пеленг заметно не изменяется) (рис. 3). Можно сказать, что суда-цели в этом случае стягиваются к началу развертки.
Допустим, что планируется поворот вправо на 40°. На рис. 3 показано соответствующее этом повороту положение "направляющей линии". Можно сказать, что направление ЛОД целей после нашего поворота изменится таким образом, что эхо-сигналы будут как бы стягиваться уже не в начало развертки, а к "направляющей линии" (в этом случае ее можно называть еще и "линией стягивания").
Таким образом, расширив метод "половинного угла", можно получить описание ЗОД, близкое к универсальному. Действительно, он охватывает все сектора и направления ЛОД. Чем ближе к направляющей линии находятся суда-цели, тем менее точен прогноз (см. рис. 3, суда А и В), хотя сторону отворота ЛОД можно определить в любом случае. Направление ЛОД судна С не изменится, а относительная скорость сближения при повороте в сторону эхо-сигнала возрастет.
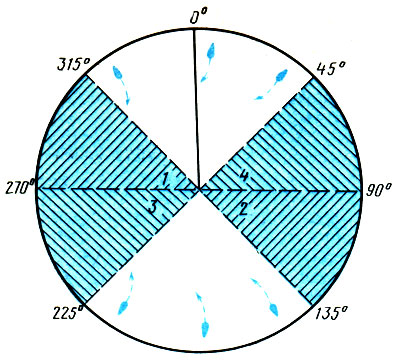
Рис. 1
Может возникнуть вопрос, насколько ЛОД целей изменит свое направление при повороте на 40°. Для ответа можно воспользоваться следующим определением: чем больше относительная скорость сближения, тем ближе от начала развертки ожидаемая ЛОД (рис. 4, пунктирная линия) пересекает "направляющую линию" и соответственно тем меньше идет угол разворота ЛОД (судно А). Чем меньше относительная скорость сближения, тем дальше от начала развертки след послесвечения (ОЛОД) пересекает "направляющую линию" и соответственно тем больше угол между ЛОД и ОЛОД (судно В). У судна-сателлита точка пересечения удалена в бесконечность, и появляющаяся при нашем маневре ЛОД всегда параллельна "направляющей линии" (судно С). В случае равенства относительной и нашей скорости ОЛОД пересекает направляющую линию на дистанции, равной дистанции до цели в момент нашего изменения курса (судно Д). Последнее утверждение справедливо только при изменениях курса на 60°, при других значениях угла поворота оно может использоваться как ориентировочное.
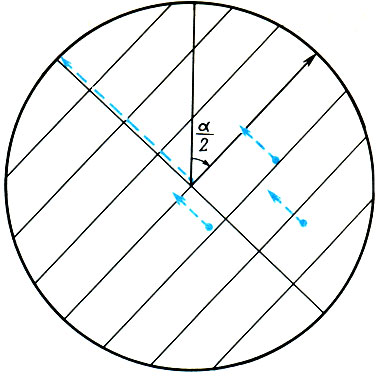
Рис. 2
Описанный подход можно использовать и для целей, пеленг которых изменяется заметно. Изменение направления ЛОД у таких целей, например, потенциально опасной цели Е (см. рис. 4), будет таким же, как у цели А, ЛОД которой проходит через начало развертки, а также цели Е и С (см. рис. 3).
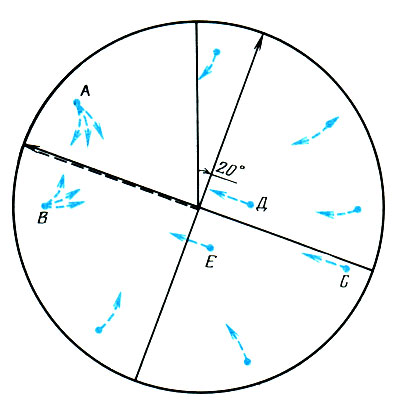
Рис. 3
Таким образом, предполагаемый способ позволяет определить не только качественный критерий (сторону поворота), но и оценить величину угла разворота ЛОД. Но при этом процесс обработки информации усложняется, и в условиях мостика может рассматриваться только качественная оценка (как и во всех применяемых описаниях ЗОД). Интересно, что описанный подход совершенно аналогичен и применим и при изменениях скорости хода: разница при этом только в том, что "направляющая линия" ("линия стягивания") совпадает с курсовой чертой при уменьшении скорости и с линией кильватерной струи (направленной по КУ=180°) - при увеличении скорости.
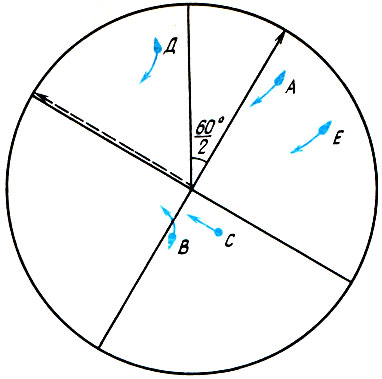
Рис. 4
Например, при уменьшении скорости хода (рис. 5) эхо-сигналы, пеленг которых заметно не изменяется, стягиваются к курсовой черте (направление следа послесвечения изменяется от кормы к носу). Сателлит (судно Д, см. рис. 3 и рис. 5) следует параллельно "направляющей линии", сохраняет параллельность ЛОД и т. д. При изменениях и курса, и скорости "направляющая линия" ориентирована относительно курсовой черты, поэтому рассматриваемый способ может использоваться при ориентации РЛС и "по курсу", и "по северу". Необходимо помнить, что на надежность прогноза влияет учет вероятных маневров судов-целей в рассматриваемых конкретных ситуациях расхождения.

Рис. 5
В заключение необходимо сделать предостережение о том, что предполагаемый способ сам по себе не является панацеей для обеспечения безопасного расхождения.
Прогнозирование (на основе одного из вариантов описания ЗОД) - хотя и важная, но все же только составная часть процесса обработки информации. Необходимо, чтобы судоводители хорошо понимали суть относительного движения, "работу" скоростного векторного треугольника. Эта задача отрабатывается в ходе обучения на радиолокационных тренажерах, где решается большое количество задач на маневренном и антипараллаксном планшетах. При этом у судоводителей развивается понимание закономерностей относительного движения. Принято считать, что на этом основании судоводители могут успешно прогнозировать ситуацию расхождения и глазомерно - на экране РЛС. Это действительно так, когда целей немного: одна или две. Если же целей больше (как в группе промысловых судов), то для их одновременной обработки уже необходим специальный подход, например рассматриваемый способ. Его применение позволяет капитану, не отрываясь от экрана РЛС, в сложных условиях оперативно "проигрывать" варианты маневрирования, а также контролировать расчеты штурмана и тем самым повышать безопасность мореплавания при ограниченной видимости.
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://ribovodstvo.com/ 'Рыбоводство'